







 > RESEARCH > OPTIMAL ESTIMATION > Particle Filter
> RESEARCH > OPTIMAL ESTIMATION > Particle Filter파티클 필터(particle filter)
파티클 필터(particle filter)는 많은 상태변수 후보(particles)를 시스템의 확률 분포와 연계하여 시스템의 결과를 추정하는 방식이다.
파티클 필터는 많은 계산량(computation load)을 요구하기 때문에 1950년대에 처음으로 소개가 되었지만, 당시의 컴퓨터로는 계산이 어려워 널리 이용되지 않았다. 그러나 컴퓨터의 계산능력 향상과 함께 1987년 Kitagawa가 제시한 베이지안 필터링(Bayesian filtering)과 1988년 Liu&Chen이 제안한 리샘플링(resampling) 방식이 적용된 이후부터는 파티클 필터의 성능이 향상되어 여러 분야에서 사용되고 있다.
일반적인 파티클 필터는 다음과 같은 베이즈 법칙을 기반으로 구성되어 있다.

일반적인 칼만필터와 마찬가지로 이전 스텝의 정보를 시스템 모델의 확률과 결합하여 priori probability density function(pdf)을 구하고 측정치의 likelihood와 결합하여 측정치 업데이트에 의한 posterior pdf를 통해 상태변수의 확률분포를 구할 수 있다.

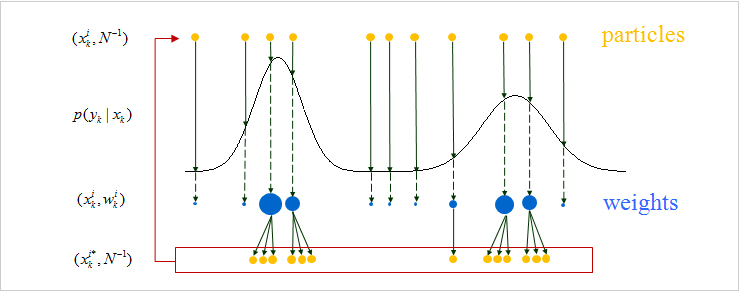
파티클 필터의 기본 개념은 그림과 같다. N개의 입자(state)를 시스템의 확률 분포에 똑같은 가중치로 무작위로 배치한다. 이 때 시스템의 확률 분포가 큰 값에 배치된 입자의 가중치는 커지고, 작은 값에 배치된 입자의 가중치는 작아진다. 그리고 새로 생성된 가중치의 크기를 비교하는데, 작은 값의 가중치를 가지는 입자들은 신뢰하지 않기 때문에 없애고, 큰 값의 가중치를 가지는 입자들만을 선택하고 비교하여 없애버린 입자만큼 자신과 같은 입자들을 생성하여 다시 N개의 입자들을 형성한다.
이렇게 생성된 N개의 입자들을 이용하여 시스템을 추정항고 또한 처음의 과정으로 돌아가 반복함으로써 시스템의 다음 결과를 추정하게 된다.
2000년대에 들어서면서 파티클 필터에 대한 연구가 활발히 이루어져 다양한 방식의 파티클 필터가 개발되었다. Sampling Importance Resampling (SIR) Filter는 기존 파티클 필터의 고질적인 문제인 degeneracy 문제와 계산량을 감소시켰다. 1999년 Pitt와 Shephard는 가중치가 균일하게 형성되지 않았을 경우에 생기는 문제를 해결하기 위해 Auxiliary Sampling Importance Resampling(ASIR) Filter를 제안하였다.
이외에도 Markov Chain Monte Carlo(MCMC) 기법을 사용하여 sample 형성 방식을 개선한 Regularized particle Filter나 SIR 필터에 Kalman Filter를 적용하여 degeneracy 문제를 더욱 감소시킨 Local Linearization Particle Filters(LLPF), 다양한 모델이 존재할 때 적용되는 Multiple Model Particle Filter와 같은 다양한 방식의 파티클 필터가 연구되고 있다.

서울대학교 항법전자시스템연구실 | 주소 : 서울특별시 관악구 관악로 1 서울대학교 | 교수 연구실 : 133동 603호 (Tel. 02-880-7308)
대학원생 연구실 : 133동 607호 (Tel. 02-880-1732) | 실험실 : 302동 418-1호 |
Copyright by NESL All Rights Reserved.