







 > RESEARCH > INERTIAL NAVIGATION > Introduction
> RESEARCH > INERTIAL NAVIGATION > Introduction
1980년대 후반부터 초소형 반도체 제조공정 기술에 근간한 MEMS 기술의 발전으로 MEMS 관성센서를 이용한 관성시스템(ARS or AHRS)이 자동차, 핸드폰, 로봇등에 광범위하게 사용되며 주목을 받고 있다.
일반적인 스트랩다운 관성항법 알고리즘의 구성은 다음그림과 같다.
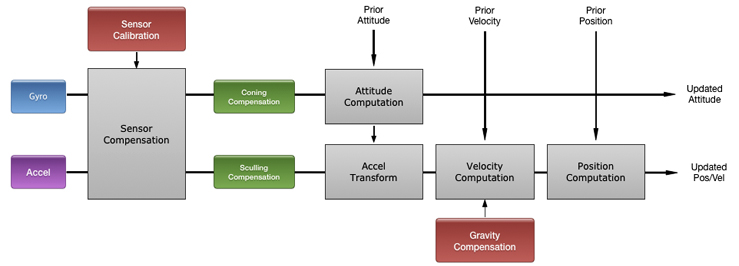
가속도계와 자이로 센서데이터는 Sensor Calibration을 통해 센서 데이터의 오차를 보상하여 보다 정확한 가속도와 각속도 데이터로 변환한다. 항법계산 주기와 센서 샘플링 주기가 다를 경우 생길 수 있는 오차를 보상하기 위하여 Coning과 Sculling Compensation을 수행한다. 각속도를 적분하여 항체의 자세를 계산하고 이 자세를 이용하여 가속도 데이터를 항법좌표계로 변환하고 중력을 보상하여 항법좌표계에서의 속도를 계산한다. 이렇게 계산된 속도를 다시 적분하여 위치를 계산한다.
알고리즘 구성도에서 알 수 있듯이 스트랩다운 관성항법 알고리즘은 특성상 해결해야할 많은 공학적인 문제들을 발생시킨다. 자이로 가속도계 센서 출력을 이용하여 자세를 계산하는 문제(Attitude Algorithm), 관성센서에서 적분과정이 충분히 빠르지 못해 생기는 오차를 보상하기 위한 코닝과 스컬링 보상(Coning and Sculling Compensation), 자이로 및 가속도계와 같은 센서 보상(Calibration)방법과 항법모드 진입전에 항체의 초기 자세를 걸정하는 초기 정렬이(Initial Alignment)나 항법모드 중에 발생하는 항법오차를 보조센서를 사용하여 보정하는 운항 중 정렬(in-Flight Alignment)등의 정렬 문제, 저가형 MEMS INS를 사용할 경우 사용하는 AHRS 알고리즘등이 있다.

서울대학교 항법전자시스템연구실 | 주소 : 서울특별시 관악구 관악로 1 서울대학교 | 교수 연구실 : 133동 603호 (Tel. 02-880-7308)
대학원생 연구실 : 133동 607호 (Tel. 02-880-1732) | 실험실 : 302동 418-1호 |
Copyright by NESL All Rights Reserved.