







 > RESEARCH > AIDED NAVIGATION > INS/GPS Coupling Algorithm
> RESEARCH > AIDED NAVIGATION > INS/GPS Coupling AlgorithmINS/GPS Coupling Algorithm
INS/GPS 결합 시스템은 결합 방식에 따라 크게 비결합(uncoupled) 방식, 약결합(loosely coupled) 방식과 강결합(tightly coupled) 방식으로 구분할 수 있다.
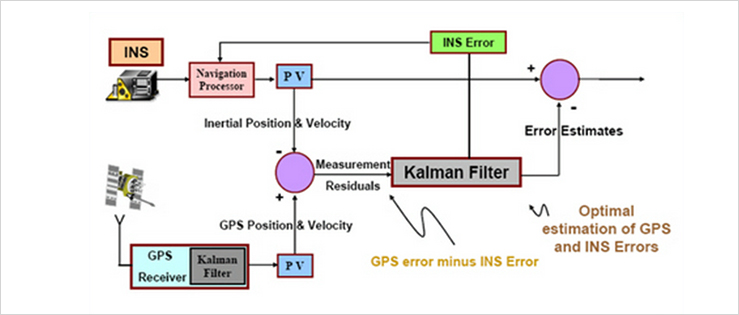
이 외에도 초강결합(ultra-tightly or deeply coupled) 방식이 있는데 여기서는 비결합 방식, 약결합 방식과 강결합 방식에 대해서 간단히 설명한다. 비결합(uncoupled)은 서로에게 영향을 주지 않는 독립된 GPS와 INS를 결합하는 방법으로 단순한 항법 정보의 선택자(selector)를 구성하는 것과 유사하다. 이 방법의 특징은 쉽고 빠르게 구성할 수 있으며 각 시스템의 고장에 무관하게 동작한다는 점이다. 약결합(loosely coupled)방식은 그림2와 같이 구성할 수 있다. GPS는 독립적인 항법 해를 계산하여 칼만필터는 INS(또는 IMU)와 GPS가 계산한 항법정보를 이용하여 오차를 추정 보상하도록 되어 있다.

약결합 방식은 구성이 쉽다는 장점이 있으며, 상태변수의 차수가 다른 방법에 비하여 작다는 장점도 있다. 또한 두 개의 작은 칼만 필터가 큰 칼만필터를 대체하기 때문에 계산 속도가 빠르다. 하지만 위성이 3개 미만인 경우에는 GPS가 항법 정보를 계산할 수 없기 때문에 결합 시스템에서도 오차를 추정 보상하는 것이 불가능해진다는 단점을 가지고 있다. 또한 항법 필터와 GPS 수신기 필터 사이의 상호 피드백 구조에 의하여 안정성이 떨어진다는 단점도 존재한다. 강결합 방식은 GPS 수신기는 직접 항법 정보를 계산하지 않고 수신기와 위성간의 의사 거리와 의사 거리 변화율을 제공하고 IMU는 측정한 가속도와 각속도를 칼만필터에 제공한다. GPS 수신기의 추적루프를 돕기 위하여 계산된 속도와 위치 또는 자세 정보가 수신기의 추적루프로 바로 피드백 된다. 강결합 방식은 위성이 3개 미만인 경우에도 독자적으로 동작할 수 있다는 특징을 가지고 있다. 그러나 GPS 수신기의 구조를 정확히 알아야 구현할 수 있으므로 실제 구성이 쉽지 않다는 단점을 가지고 있다. 따라서 IMU와 GPS 수신기 모두를 제조하는 회사에서 주로 연구, 개발되고 있다 실정이다. 그림3은 강결합 방식의 INS/GPS 결합시스템을 보여준다.
강결합 방식 개념도
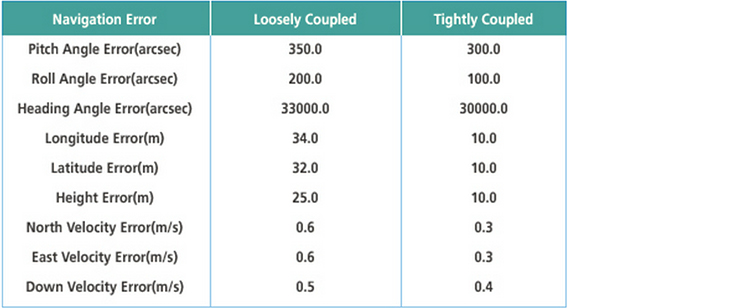
위에서 설명한 방식을 정리하면 약결합 방식은 GPS 위치, 속도 정보를 이용하여 시스템 레벨을 결합하는 방식이며 구성이 용이하고, 모델이 간단하며 계산량이 적다는 장점이 있지만 가시 위성이 3개 이하일 때 오차가 증가하고 동적 특성이 나쁘다는 단점을 가지고 있다. 강결합 방식은 GPS 의사거리, 의사거리 변화율 정보를 이용한다는 특징을 가지고 있으며 동적 특성이 좋고 가시위성의 제한을 받지 않으며 INS의 속도 정보를 GPS로 피드백 한다. 하지만 설계가 복잡하고 구현이 어려우며 측정 모델이 복잡하다는 단점을 지니고 있으며 가시위성의 개수에 따라 계산량이 증가하는 단점 또한 가지고 있다. 다음에 보는 표는 약결합 방식과 강결합 방식의 성능을 비교한 표이다. 전체적인 성능은 강결합 방식이 좀더 좋은 성능을 보이는 것을 알 수 있다.
약결합 방식과 강결합 방식의 성능 비교표
Reference : “Development of a Low-Cost Integrated GPS/IMU System.” IEEE AES System Magazine, 1998

서울대학교 항법전자시스템연구실 | 주소 : 서울특별시 관악구 관악로 1 서울대학교 | 교수 연구실 : 133동 603호 (Tel. 02-880-7308)
대학원생 연구실 : 133동 607호 (Tel. 02-880-1732) | 실험실 : 302동 418-1호 |
Copyright by NESL All Rights Reserved.