







 > RESEARCH > OPTIMAL ESTIMATION > Introduction
> RESEARCH > OPTIMAL ESTIMATION > Introduction지상 무기 체계와 같이 초기 자세 오차가 큰 경우나 급격한 기동으로 인하여 항법 오차 모델의 선형성을 보장 할 수 없는 환경에서는 INS 시스템과 GPS 측정치는 비선형 특성을 가지는 비선형 시스템이 된다. 이러한 비선형 시스템의 오차를 정확하게 추정하기 위해서는 기존에 사용된 칼만필터(Kalman Filter)와는 다른 비선형 필터가 요구된다.
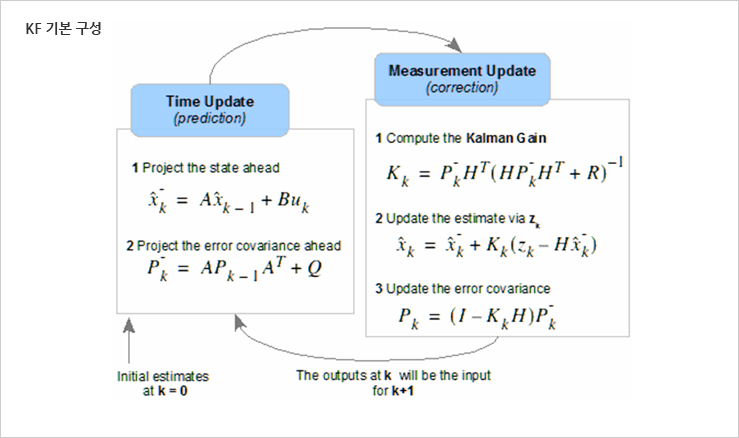
대표적인 비선형 필터로 확장 칼만필터 (EKF)가 있으며 최근 20여년간 비선형 모델에 널리 사용되어 왔다. 그러나 EKF는 비선형 모델을 1차 선형화 시켜서 사용하는 것으로 오차가 매우 클 경우에는 추정 성능이 저하되는 단점을 가지게 된다. 이러한 문제를 해결하기 위하여 최근에는 다양한 비선형 필터링 기법이 제시되었으며 대표적으로 UKF (Unscented Kalman Filter)와 PF (Particle Filter) 등을 들 수 있다.
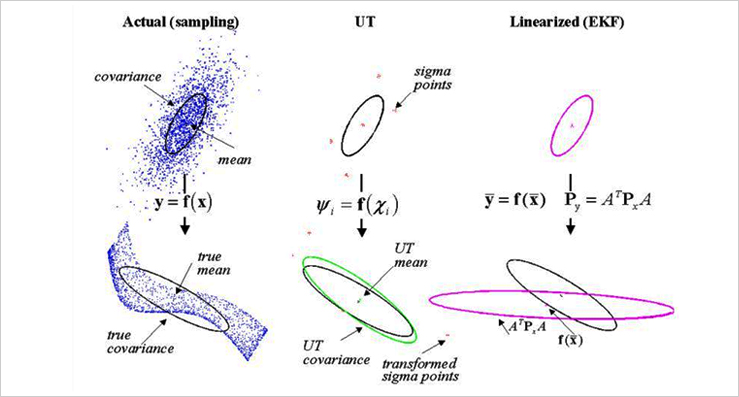
UKF는 sigma point (SP)라 부르는 확정적인 선택 점(Deterministically shosen points)의 집합을 비선형 모델을 사용하여 변환하는 Unscented transform (UT)을 이용한다. SP은 비선형 모델의 랜덤 상태변수를 통계적으로 가장 잘 나타낼 수 있도록 선택한다.
일반적으로 가우시안 모델에 대하여 SP를 결정하여 비선형 필터링을 수행하는 기법을 sigma point Kalman filter (SPKF)로 정의하며 SPKF 종류로 UKF 와 CDKF (Central Difference Kalman filter), 제곱근 형태(Square root, SR)로 SP를 결정하는 SRUKF, SRCDKF 등이 있다.
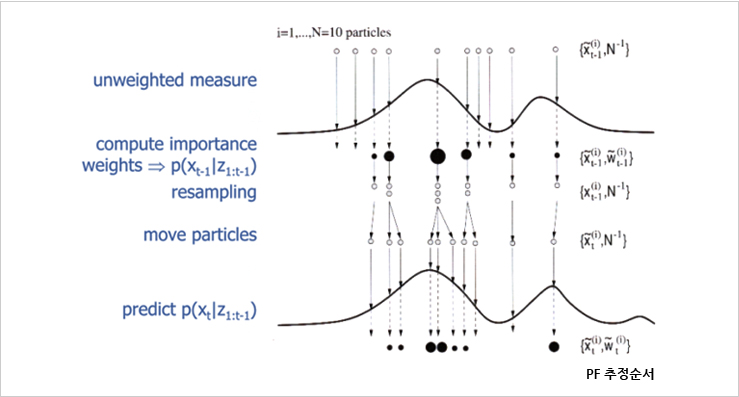
PF는 많은 입자(particles)들을 시스템의 확률분포와 연계하여 시스템의 결과를 추정하는 방식이다. 파티클 필터는 1950년대 처음 소개가 되어 연구되기 시작했지만, 1970년대까지만 하더라도 계산량이 매우 많았기 때문에 많이 사용되지 않았다 그러나 1980년대 들어와서 Bayesian filtering과 resampling 방식이 적용된 후에는 PF의 성능이 향상되어 여러 분야에서 사용되고 있다.

서울대학교 항법전자시스템연구실 | 주소 : 서울특별시 관악구 관악로 1 서울대학교 | 교수 연구실 : 133동 603호 (Tel. 02-880-7308)
대학원생 연구실 : 133동 607호 (Tel. 02-880-1732) | 실험실 : 302동 418-1호 |
Copyright by NESL All Rights Reserved.