







 > RESEARCH > INERTIAL NAVIGATION > Attitude Algorithm
> RESEARCH > INERTIAL NAVIGATION > Attitude Algorithm자세 계산 알고리즘
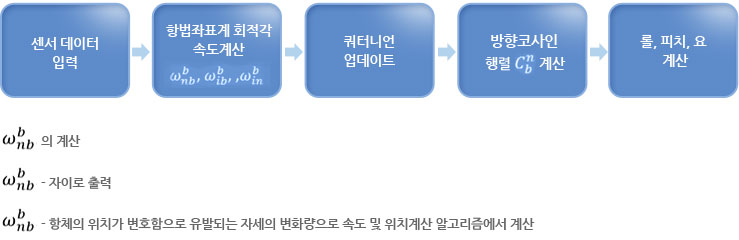
자세 계산 알고리즘은 자이로에서 측정되는 동체의 회전 각속도를 이용하여 동체좌표계와 항법좌표계 사이의 좌표변환 행렬을 구하는 것이며, 그 방법으로는 오일러 각 방법(Euler angle method), 방향코사인행렬 방법(Direction Cosine Matrix method), 쿼터니언 방법(Quaternion method)이 있으며 각 방법의 장단점은 아래와 같다.
자세 계산 알고리즘의 종류와 장단점
| 장점 | 단점 | |
|---|---|---|
| 오일러 각 | -최소한의 매게변수(롤각, 피치각, 요각)로 계산이 가능 | -미분 방정식의 삼각 함수의 특이치 문제(Singularity Problem)가 존재 |
| -물리적으로 이해하기 쉬움 | ||
| 방향 코사인 | -물리적으로 이해하기 쉬움 | -너무 많은 요소의 적분 필요 |
| -미분방정식의 전개가 간단 | ||
| 쿼터니언 | -계산이 상대적으로 간단 | -물리적으로 이해하기 어려움 |
| -수치적으로 안정 |
스트랩다운 관성항법시스템에 대한 순수항법 알고리즘

서울대학교 항법전자시스템연구실 | 주소 : 서울특별시 관악구 관악로 1 서울대학교 | 교수 연구실 : 133동 603호 (Tel. 02-880-7308)
대학원생 연구실 : 133동 607호 (Tel. 02-880-1732) | 실험실 : 302동 418-1호 |
Copyright by NESL All Rights Reserved.