
1980년대 후반부터 초소형 반도체 제조공정 기술에 근간한 MEMS 기술의 발전으로 MEMS 관성센서를 이용한 관성시스템(ARS or AHRS)이 자동차, 핸드폰, 로봇등에 광범위하게 사용되며 주목을 받고 있다.
일반적인 스트랩다운 관성항법 알고리즘의 구성은 다음그림과 같다.
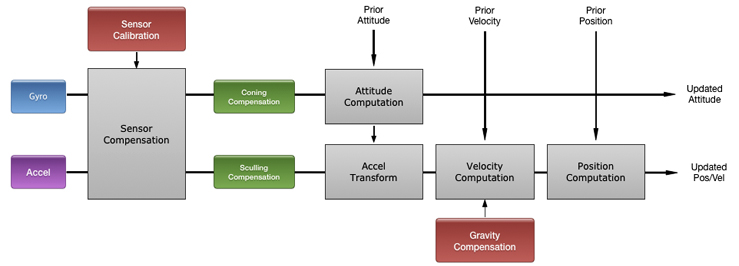
가속도계와 자이로 센서데이터는 Sensor Calibration을 통해 센서 데이터의 오차를 보상하여 보다 정확한 가속도와 각속도 데이터로 변환한다. 항법계산 주기와 센서 샘플링 주기가 다를 경우 생길 수 있는 오차를 보상하기 위하여 Coning과 Sculling Compensation을 수행한다. 각속도를 적분하여 항체의 자세를 계산하고 이 자세를 이용하여 가속도 데이터를 항법좌표계로 변환하고 중력을 보상하여 항법좌표계에서의 속도를 계산한다. 이렇게 계산된 속도를 다시 적분하여 위치를 계산한다.
알고리즘 구성도에서 알 수 있듯이 스트랩다운 관성항법 알고리즘은 특성상 해결해야할 많은 공학적인 문제들을 발생시킨다. 자이로 가속도계 센서 출력을 이용하여 자세를 계산하는 문제(Attitude Algorithm), 관성센서에서 적분과정이 충분히 빠르지 못해 생기는 오차를 보상하기 위한 코닝과 스컬링 보상(Coning and Sculling Compensation), 자이로 및 가속도계와 같은 센서 보상(Calibration)방법과 항법모드 진입전에 항체의 초기 자세를 걸정하는 초기 정렬이(Initial Alignment)나 항법모드 중에 발생하는 항법오차를 보조센서를 사용하여 보정하는 운항 중 정렬(in-Flight Alignment)등의 정렬 문제, 저가형 MEMS INS를 사용할 경우 사용하는 AHRS 알고리즘등이 있다.
Introduction
MEMS IMU에서 획득되는 가속도계와 자이로 센서의 측정값은 매 측정마다 일정하게 유지되는 정규오차(deterministic)와 확률적 특성을 갖는 불규칙 오차(random error)를 포함하고 있다.
정규 오차의 주요 원인으로는 가속도계와 자이로의 바이어스 오차와 환산계수 오차, 비정렬 오차 등이 있으며 이러한 오차들은 IMU 다위치 시험(multi position test)을 통해 그 오차 계수를 추정한 후 항법 알고리즘 수행 전에 정규 오차 보상 알고리즘에서 보상해 주어야 한다. 반면 불규친 오차는 시간에 따라 불규칙적으로 변화하므로 필터링 기법을 이용하여 확률적으로 가장 적합한 오차를 추정하여 보상한다.
여기서 소개할 내용은 MEMS 센서에 온도보상을 실시하고 레이트 테이블(rate table)을 이용하여 센서 바이어스 및 환산계수 추정이다.
센서 온도 보상 알고리즘 개발
- 일반적으로 저가형 관성센서는 온도에 의해 큰 오차가 발생한다. 그러므로 온도 센서로 측정한 온도를 이용하여 자이로와 가속도계 , 지자기 센서 데이터를 보정해주어야 한다.
- 이를 센서 온도 보상이라고 하며, 수행과정과 결과는 그림 1~2과 같다.
- 보상 결과를 보면 알 수 있듯이 센서의 바이어스가 온도에 따라 선형적 또는 고차 다항식으로 표현 됨을 알 수 있다.


정렬알고리즘
정렬알고리즘은 항체의 플랫폼 또는 동체 좌표계(body frame)를 항법 계산 좌표계(navigation frame)로 변환시키는 과정이라고 할 수 있다. 이는 두 좌표계가 이루는 오일러(Euler) 자세각을 계산하고 이를 바탕으로 방향코사인행렬(DCM), 또는 쿼터니언(quaternion)을 계산하는 것이다. 플랫폼 좌표계는 일반적으로 서로 직교인 가속도계 3축의 방향을 말한다.
동체 좌표계는 흔히 항체의 롤, 피치 , 요각과 일치한다. 항법 좌표계는 ECI(Earth Centered Inertial), ECEF(Earth Centered Earth Fixed), 또는 LGV(Local Geodetic Vertical) 좌표계 등이 있다.
탄도 미사일, 우주선 등에서 항법 좌표계는 편리성 때문에 흔히 ECI, ECEF로 표현되며, 항공기 등에서는 계산 좌표계를 흔히 지구의 표준타원체를 기준으로 한 LGV로 표현한다. 목표물 추적(target tracking) 등의 분야에서는 LGV의 일종인 local ENU(Earth, North, Up) 직교 좌표계로 표현하는 것이 일반적이고, 비행기 등에서는 고도를 양수로 표현하는 관행 때문에, ENU 좌표계보다 local NED(North, East, Down) 좌표계로 표현하는 것이 일반적이다.
정렬 알고리즘은 수행하는 시점과 외부 항체로부터 정보 입수 여부, 정렬의 정확도 등을 기준으로 다음과 같이 다양하게 분류할 수 있다. 먼저, 정렬 알고리즘을 시점에 따라 분류하면 초기정렬(initial alignment)과 운항중정렬(inflight alignment) 알고리즘으로 나눌 수 있다. 초기정렬은 항체가 운항을 시작하기 전에 정지상태에서 정렬을 수행하는 반면에 운항중중렬은 항체가 운항하는 중에 특정한궤적을 운항하면서 수행하는 것이다.
다음으로 정렬 알고리즘을 외부로부터 자세, 속도 등의 정보를 전달받아 수행하는 전달정렬(transfer alignment)과 외부 정보 없이 독립적으로 수행하는 자기정렬(self alignment)로 구분할 수 있다. 마지막으로 항체의 개략적인 초기 자세를 계산하는 개략정렬(coarse alignment)과 이 때 발생한 오차를 추정, 보정함으로써 보다 정밀한 자세를 계산하는 정밀정렬(fine alignment)로 분류할 수 있다.
예를 들어 정리하면, 스트랩다운(strapdown)관성항법시스템에서 초기자기개략정렬이란 정밀정렬을 위해 빠른 시간 내에 좋은 초기 조건을 제공하기 위해 동체 좌표계와 항법 좌표계 간의 초기 자세각 관계를 구하는 것이며, 이 초기 자세각(오일러 각)을 바탕으로 DCM, 쿼터니언을 계산하는 과정이라고 할 수 있다.

초기 개략정렬 알고리즘은 Britting이 제시한 단일 개략정렬과 본 연구실에서 개발한 2단계 개략정렬 알고리즘이다. NED 좌표계로 표현한 2단계 개략정렬 알고리즘은 다음과 같다. 2단계 개략정렬은 레벨링(Leveling)과 자이로컴파싱(Gytocompassing) 원리를 이용하여 중력가속도와 지구 자전각속도를 나누어서 좌표변환행렬과 자세각을 구한다.

자세 계산 알고리즘
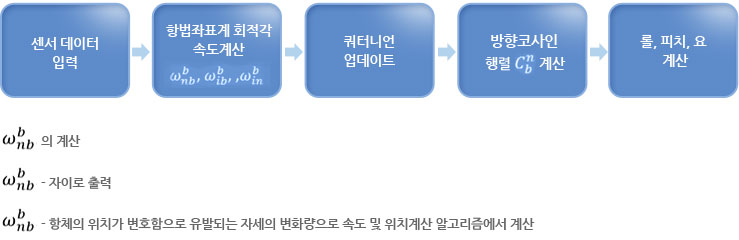
자세 계산 알고리즘은 자이로에서 측정되는 동체의 회전 각속도를 이용하여 동체좌표계와 항법좌표계 사이의 좌표변환 행렬을 구하는 것이며, 그 방법으로는 오일러 각 방법(Euler angle method), 방향코사인행렬 방법(Direction Cosine Matrix method), 쿼터니언 방법(Quaternion method)이 있으며 각 방법의 장단점은 아래와 같다.
자세 계산 알고리즘의 종류와 장단점
| 장점 | 단점 | |
|---|---|---|
| 오일러 각 | -최소한의 매게변수(롤각, 피치각, 요각)로 계산이 가능 | -미분 방정식의 삼각 함수의 특이치 문제(Singularity Problem)가 존재 |
| -물리적으로 이해하기 쉬움 | ||
| 방향 코사인 | -물리적으로 이해하기 쉬움 | -너무 많은 요소의 적분 필요 |
| -미분방정식의 전개가 간단 | ||
| 쿼터니언 | -계산이 상대적으로 간단 | -물리적으로 이해하기 어려움 |
| -수치적으로 안정 |
스트랩다운 관성항법시스템에 대한 순수항법 알고리즘
일반적으로 항법 계산 주기와 관성 센서 데이터의 샘플링 주기는 일치하지 않으며, 항법계산주기에 비하여 센서 데이터의 샘플링주기가 빠른 경우가 대부분이다. 이럴 경우, 항법 계산 주기 동안 관성 센서 데이터의 출력을 적분하여 항법계산에 이용한다.
하지만 고속으로 기동하는 항체의 경우, 항법 계산주기보다 더 높은 주파수의 가속도와 각속도 성분이 존재하는데, 이러한 경우 항법계산 주기 동안 가속도계와 자이로의 출력을 적분하는 과정에서 오차가 발생하게 된다.
가속도계와 자이로에서 발생하는 이러한 오차를 보상하는 것을 각각 Coning, Sculling Compensation이라고 한다.

코닝 오차는 항체의 두 축에 위상차를 지닌 정현파 운동이 입력될 경우 나타난다.
예를 들어 위의 그림과 같이 T0에서 T4까지 관성센서 데이터를 적분하여 사용하는 경우를 생각해 보자. 그래프 상에서 살펴보면 T0~T4사이의 항법계산 주기 동안, 차례로 x축으로 각속도 a,y축으로 각속도 b, 다시 x축으로 각속도 -a, 마지막으로 y축으로 각속도 -b로 회전이 들어왔다. 따라서 실제로는 x축과 y축으로 그래프 아래 부분을 적분한 만큼의 회전이 일어났지만, 전체 구간 동안의 각속도를 적분하여 사용할 경우, x, y축으로의 각속도 입력은 0이 되기 때문에 자세는 변화하지 않은 것으로 계산되고, 결과적으로 자세오차가 발생하게 된다.

한편 스컬링 오차는 한 축에 정현파 회전운동이 입력되고, 그에 수직한 다른 축에 선형 혹은 정현파 가속도 운동이 입력되면 발생한다. 이 때 각속도와 가속도 운동이 입력되는 2축이 아닌 남은 1축에 대하여 속도오차가 발생하게 된다.
위의 그림에서 볼 수 있듯이, x축으로 일정 성분의 가속도가 들어오고, z축으로 90도 회전 후, y축으로 가속도가 들어온 후 다시 z축으로 -90도 회전하게 되면, 그림에서 볼 수 있듯이 원래 위치와 자세로 돌아오게 되지만, 센서 데이터 적분 구간 동안 입력된 가속도는 x, y 축으로 가속도가 입력되고 회전은 없는 것으로 판단되어 아래의 그래프와 같이 속도 오차가 발생하게 된다.
이러한 코닝과 스컬링 오차를 보상하기 위해서는 일반적으로 항법 계산주기보다 더 짧은 샘플링 구간을 정하여 현재 센서 데이터 샘플과 메모리에 저장된 과거 데이터 샘플 1~2개를 이용한 오차 보상 알고리즘을 통하여 보상한다.
ARS
ARS는 가속도계와 자이로 같은 관성센서를 이용하여 동체의 자세를 계산하는 IMU를 말한다. AHRS는 ARS에 지자기 센서를 추가하여 자세뿐만 아니라 방위각도 계산할 수 있는 IMU이다.
ARS와 AHRS는 주로 소형 무인항공기나 자율 주행 차량, 또는 로봇 등의 자세 제어에 사용되고 있으며 최근 관성센서 방식의 motion capture system에도 응용되고 있다.
ARS는 동체의 자세 중, 롤과 피치를 계산하는 장치로 자이로와 가속도계를 이용하여 정확한 동체의 자세를 계산한다.
일반적인 관성항법 시스템에서 동체의 자세는 자이로를 이용하여 동체의 각속도를 측정한 후 적분 계산을 수행하여 계산한다. 그러나 저가형 자이로의 출력에는 센서 오차가 포함되어 있으므로 정확한 각속도 측정이 불가능하다. 그리고 자이로에 포함된 매우 작은 오차도 적분과정을 거치면 자세오차를 기하급수적으로 크게 만들어 자세 오차가 발산하게 된다. 그래서 일반적인 ARS는 자세계산을 위하여 가속도계를 이용한 보정 과정을 거치게 된다.
이러한 자세 보정 과정은 주로 칼만 필터나 least square 필터 등의 방식을 이용한다.

ARS는 가속도계를 이용하여 중력가속도만을 이용한 보정을 수행하므로 방위각은 자이로에 의한 계산만을 수행한다. 이 경우 방위각 오차가 발산하여 방위각은 계산할 수 없다. 따라서 방위각을 계산하기 위해서는 지자기 센서의 출력도 함께 사용하는 자세 보정 방식이 필요하다.
AHRS는 ARS에 지자기 센서를 추가한 형태이다. 그러나 지자기 센서는 외부 자기장의 변화에 민감하게 반응하므로 이를 적절히 처리하는 형태의 알고리즘 개발이 필수적이다. 아래 사진은 본 연구실에서 개발한 AHRS의 모습이다.


고도 20,183~20,187km를 11시간 58분의 주기로 지구를 회전하며 L1(1.57542GHz)과 L2(1.22760GHz)의 L-band 반송파를 이용하여 CDMA 방식으로 통신을 한다. 각 위성마다 Cesium 원자시계와 Rubidium 원자시계를 갖고 있어 정확한 시간을 수신기에 송신해 준다. 위성신호는 PRN(Psedo-Random Number) 코드와 항법메세지 그리고 반송파가 있는데 PRN 코드는 민간용으로 사용되고 있는 L1 반송파를 이용한 C/A 코드와 군용으로만 쓰이는 L1, L2 반속파를 이용한 P 코드가 위성마다 고유 코드로 지정되어 있다.
항법 메세지에는 위성시계 보정치, 위성의 궤도 정보를 갖고 있는 Ephimeris, 다른 위성의 궤도정보와 모든 위성의 배열 상태와 건강 상태 그리고 이온층 모델을 포함한 Almanac으로 구성되어 있다. GPS는 군용으로 개발되었으나 C/A 코드만 민간으로 사용이 개방되어 항법용, 측지용 그리고 시각측정과 동기의 목적으로 사용되고 있는데, L1 반송파만을 이용하여 전리층 보상에 불리한데다가 위성의 위치를 왜곡시키는 SA(Selective Availability)로 수평으로 100m, 수직으로 150m의 측정 오차를 가진다. 군용 시스템은 L1, L2 반송파를 사용하여 전리층 지연을 보상해 주고 암호화된 Y 코드를 써서 16m의 측정 오차를 가진다.
민간 연구기관에서는 SA의 영향을 받는 C/A 코드 만으로 정확한 위치 정보를 알기 위한 다양한 연구를 하고 있으며 그 예가 DGPS(Differential GPS)이다. 기준국에서 GPS 위성신호를 수신하여 계산된 위치값과 이미 알고 있는 위치 값을 비교하여 오차 보정값을 계산하여 사용자에게 알려줌으로써 사용자가 자신의 위치계산에 반영하게 한다. 이런 방법으로 측정오차를 수 m까지 줄일 수 있다.
INS/GPS Coupling Algorithm
INS/GPS 결합 시스템은 결합 방식에 따라 크게 비결합(uncoupled) 방식, 약결합(loosely coupled) 방식과 강결합(tightly coupled) 방식으로 구분할 수 있다.
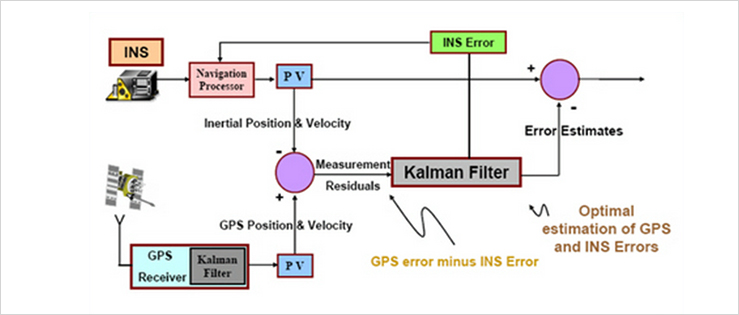
이 외에도 초강결합(ultra-tightly or deeply coupled) 방식이 있는데 여기서는 비결합 방식, 약결합 방식과 강결합 방식에 대해서 간단히 설명한다. 비결합(uncoupled)은 서로에게 영향을 주지 않는 독립된 GPS와 INS를 결합하는 방법으로 단순한 항법 정보의 선택자(selector)를 구성하는 것과 유사하다. 이 방법의 특징은 쉽고 빠르게 구성할 수 있으며 각 시스템의 고장에 무관하게 동작한다는 점이다. 약결합(loosely coupled)방식은 그림2와 같이 구성할 수 있다. GPS는 독립적인 항법 해를 계산하여 칼만필터는 INS(또는 IMU)와 GPS가 계산한 항법정보를 이용하여 오차를 추정 보상하도록 되어 있다.

약결합 방식은 구성이 쉽다는 장점이 있으며, 상태변수의 차수가 다른 방법에 비하여 작다는 장점도 있다. 또한 두 개의 작은 칼만 필터가 큰 칼만필터를 대체하기 때문에 계산 속도가 빠르다. 하지만 위성이 3개 미만인 경우에는 GPS가 항법 정보를 계산할 수 없기 때문에 결합 시스템에서도 오차를 추정 보상하는 것이 불가능해진다는 단점을 가지고 있다. 또한 항법 필터와 GPS 수신기 필터 사이의 상호 피드백 구조에 의하여 안정성이 떨어진다는 단점도 존재한다. 강결합 방식은 GPS 수신기는 직접 항법 정보를 계산하지 않고 수신기와 위성간의 의사 거리와 의사 거리 변화율을 제공하고 IMU는 측정한 가속도와 각속도를 칼만필터에 제공한다. GPS 수신기의 추적루프를 돕기 위하여 계산된 속도와 위치 또는 자세 정보가 수신기의 추적루프로 바로 피드백 된다. 강결합 방식은 위성이 3개 미만인 경우에도 독자적으로 동작할 수 있다는 특징을 가지고 있다. 그러나 GPS 수신기의 구조를 정확히 알아야 구현할 수 있으므로 실제 구성이 쉽지 않다는 단점을 가지고 있다. 따라서 IMU와 GPS 수신기 모두를 제조하는 회사에서 주로 연구, 개발되고 있다 실정이다. 그림3은 강결합 방식의 INS/GPS 결합시스템을 보여준다.
강결합 방식 개념도
위에서 설명한 방식을 정리하면 약결합 방식은 GPS 위치, 속도 정보를 이용하여 시스템 레벨을 결합하는 방식이며 구성이 용이하고, 모델이 간단하며 계산량이 적다는 장점이 있지만 가시 위성이 3개 이하일 때 오차가 증가하고 동적 특성이 나쁘다는 단점을 가지고 있다. 강결합 방식은 GPS 의사거리, 의사거리 변화율 정보를 이용한다는 특징을 가지고 있으며 동적 특성이 좋고 가시위성의 제한을 받지 않으며 INS의 속도 정보를 GPS로 피드백 한다. 하지만 설계가 복잡하고 구현이 어려우며 측정 모델이 복잡하다는 단점을 지니고 있으며 가시위성의 개수에 따라 계산량이 증가하는 단점 또한 가지고 있다. 다음에 보는 표는 약결합 방식과 강결합 방식의 성능을 비교한 표이다. 전체적인 성능은 강결합 방식이 좀더 좋은 성능을 보이는 것을 알 수 있다.
약결합 방식과 강결합 방식의 성능 비교표
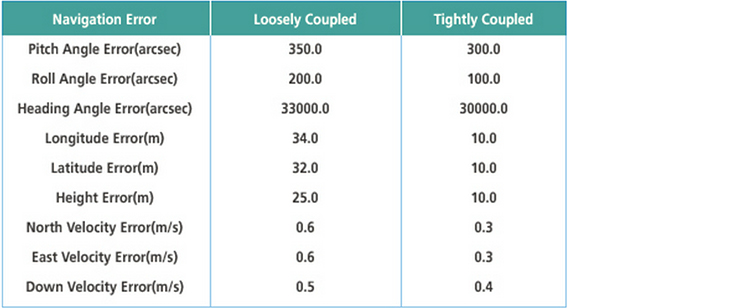
Reference : “Development of a Low-Cost Integrated GPS/IMU System.” IEEE AES System Magazine, 1998
Magnetic Compass Compensation
관성 센서인 각속도계와 가속도계만을 사용해 구성하는 Pure Navigation System은 외부로부터 신호교란이나 신호감지를 피할 수 있고 날씨와 시간 등에 전혀 구애를 받지 않는다는 장점이 있다. 그러나 각속도와 가속도를 시간에 따라 적분하여 동체의 자세와 위치를 구하기 때문에 센서가 포함하고 있는 오차도 시간에 따라 누적된다는 단점이 있다. 따라서 일정 시간 간격으로 관성 항법 오차를 보정해주는 보조 항법 장치가 필요하다. 보조 항법으로 널리 사용되고 있는 GPS는 일정한 오차 범위에서의 위치 값을 제공하여 이 값과 순수항법으로 추정한 위치를 비교하여 최종 위치를 결정하는 방식으로 관성 항법의 오차를 보정한다. 반면에 Magnetic Compass Compensation은 지구의 자기장에서 측정한 절대 방위와 관성센서로 추정하고 있는 자세와 결합하여 동체의 자세 오차를 보정한다.

Magnetic Compass는 지구를 둘러싸고 있는 거대한 자기장으로부터 자화된 나침반의 방향을 측정하여 자북을 기준으로 절대 방위각을 제공한다. 따라서 시간에 따라 오차가 증가하지 않으며, 완만한 회전 인식이 가능하다는 장점이 있다. 반면 관성 센서인 각속도계는 시간에 따른 각속도를 측정하므로 빠른 회전 인식이 가능하며 초기 자세와 최종 자세의 상대적인 자세의 변화를 알 수 있다. Magnetic Compass의 단점으로는 주변 환경에 따라 자기장이 변하는 등 외란에 의한 영향을 크게 받는 것을 들 수 있으며, 관성 센서는 시간에 따라 오차가 누적되고 완만한 회전에 대해서는 인식이 어렵다. 이와 같이 Magnetic Compass가 가지는 장단점은 관성 센서의 장단점과 서로 보완할 수 있는 특성을 가지고 있으므로 관성 센서를 중심으로 구성하는 순수 항법에 대해 Magnetic Compass로 자세 오차를 보정하는 방식으로 사용된다.

Magnetic Compass로 지구의 자기장을 측정할 때 나침반이 가리키는 지자기북극과 지구북극과의 차이각인 편각(D), 지구상의 어느 점에서 지구자기장의 방향과 그곳의 수평면이 이루는 각인 복각(I), 지자기의 강하기인 전자력의 수평분력 또는 수평자력의 세가지를 주로 측정하게 된다. 순수 항법과 결합하기 위해서 주로 편각과 복각을 사용하며, GPS를 순수 항법과 결합할 때와 마찬가지로 필터를 이용하여 결합한다. 이 때 사용하는 필터에는 대표적으로 칼만필터, 확장 칼만 필터, 무향 칼만 필터 등이 있다.


위와 같이 Magnetic Compass와 가속도계는 센서 보정을 거쳐 항법 좌표계에 대한 동체의 좌표계의 회전량을 Euler Angle로 표시할 수 있게 되고, 동체 좌표계에서의 가속도값을 구할 수 있다. 이를 적분하면 동체 좌표계에서 속도, 다시 한번 적분하면 동체 좌표계에서의 위치를 구할 수 있다. 따라서 기존의 가속도계와 각속도계만을 이용하여 순수항법을 구현하는 것에 비하여 Magnetic Compass가 제공하는 절대 방위각으로 자세 오차의 발산을 줄일 수 있고, 동체의 자세 오차를 보정하여 정확한 항법 정보(위치, 속도, 자세)를 제공할 수 있다.
지상 무기 체계와 같이 초기 자세 오차가 큰 경우나 급격한 기동으로 인하여 항법 오차 모델의 선형성을 보장 할 수 없는 환경에서는 INS 시스템과 GPS 측정치는 비선형 특성을 가지는 비선형 시스템이 된다. 이러한 비선형 시스템의 오차를 정확하게 추정하기 위해서는 기존에 사용된 칼만필터(Kalman Filter)와는 다른 비선형 필터가 요구된다.
대표적인 비선형 필터로 확장 칼만필터 (EKF)가 있으며 최근 20여년간 비선형 모델에 널리 사용되어 왔다. 그러나 EKF는 비선형 모델을 1차 선형화 시켜서 사용하는 것으로 오차가 매우 클 경우에는 추정 성능이 저하되는 단점을 가지게 된다. 이러한 문제를 해결하기 위하여 최근에는 다양한 비선형 필터링 기법이 제시되었으며 대표적으로 UKF (Unscented Kalman Filter)와 PF (Particle Filter) 등을 들 수 있다.
UKF는 sigma point (SP)라 부르는 확정적인 선택 점(Deterministically shosen points)의 집합을 비선형 모델을 사용하여 변환하는 Unscented transform (UT)을 이용한다. SP은 비선형 모델의 랜덤 상태변수를 통계적으로 가장 잘 나타낼 수 있도록 선택한다.
일반적으로 가우시안 모델에 대하여 SP를 결정하여 비선형 필터링을 수행하는 기법을 sigma point Kalman filter (SPKF)로 정의하며 SPKF 종류로 UKF 와 CDKF (Central Difference Kalman filter), 제곱근 형태(Square root, SR)로 SP를 결정하는 SRUKF, SRCDKF 등이 있다.
PF는 많은 입자(particles)들을 시스템의 확률분포와 연계하여 시스템의 결과를 추정하는 방식이다. 파티클 필터는 1950년대 처음 소개가 되어 연구되기 시작했지만, 1970년대까지만 하더라도 계산량이 매우 많았기 때문에 많이 사용되지 않았다 그러나 1980년대 들어와서 Bayesian filtering과 resampling 방식이 적용된 후에는 PF의 성능이 향상되어 여러 분야에서 사용되고 있다.
칼만 필터를 사용하여 상태 변수를 추정하는 방법은 다양하게 연구되어 왔으며, 급격한 외란이 발생하는 상황에서 외란에 대한 영향을 적게 받으며 상태 변수를 추정하는 방법으로 최근의 관측치를 주로 이용하는 이동구간 칼만 필터가 제시되었다.
최근의 관측치를 사용하여 상태 변수를 추정하는 법으로 유한 기억 추정법(Finite memory estimation)이나 이동 구간 추정법(sliding window estimation)등이 존재하며 이러한 추정자는 일종의 FIR(Finite impulse response) 추정자로 사용자가 설정한 임의의 구간에 해당하는 최근의 관측치를 사용하여 상태 변수를 추정한다. FIR 필터에 대비되어 최초의 측정치부터 추정하고 있는 현재까지의 측정치를 모두 사용하여 상태 변수를 방법으로는 IIR(Infinite impulse response)이 있다.
다음 그림은 현재의 상태 변수를 추정하기 위해 사용하는 측정치 영역을 비교하여 나타낸 것이다.

아래 그림은 동일한 측정치와 외란 구간에 대하여 IIR 필터와 FIR 필터로 추정하였을 때 상태변수의 추정 오차를 나타낸 것으로 IIR 필터와 FIR 필터 성능을 비교할 수 있고 위에서 제시한 각 필터의 특성을 확인할 수 있다.

위 그림과 같이 IIR 필터는 초기 측정치부터 현재까지 측정치를 모두 사용하여 상태변수를 추정하므로 초기 측정치가 현재까지 영향을 미치게 되고 FIR 필터는 임의의 구간에 해당하는 최근의 측정치를 사용하여 임의의 구간에 속하는 측정치만 상태변수의 추정에 영향을 미친다.
상태변수를 추정하는데 사용하는 측정치 영역의 차이는 외란에 대한 영향에서도 서로 다르게 나타난다.
일반적으로 FIR 필터는 IIR 필터에 비해 추정 오차 및 일시적 외란에 강인한 특성을 갖는데, 이는 계측치가 속한 구간이 외란의 영역을 벗어나게 되면 현재의 상태 변수는 구간 초기치(horizon initial state)만이 외란의 영향을 받기 때문이다.
따라서 외란의 영향이 계속 남아 있는 IIR 필터에 비하여 상대적으로 빠른 시간에 외란의 영향에서 벗어나 상태변수를 추정할 수 있다.
그러나 FIR은 현재의 상태 추정에 사용하는 측정치의 값이 계속 변하므로 복잡한 구조를 가지며 계산량도 많다.
반면, IIR은 초기 측정치부터 추정하고자 하는 상태의 바로 전까지 측정치 값이 현재 추정값에 반영되어 있으므로, 상태변수를 추정할 때 전체 측정치를 모두 반영하는 바로 전 단계의 추정치를 이용하여 계산량이 적고 간단한 구조를 가진다.
지상 무기 체계와 같이 초기 상태에서 작전 개시와 함께 기동을 수행해야 하는 경우나 작전 중 급격한 기동을 하는 경우에는 항법 오차 모델의 선형성을 보장 할 수 없게 되며 이로 인하여 항법시스템은 비선형 특성을 가지는 비선형 시스템이 된다.
또한 여러 실제 환경은 비선형으로 모델링 되기 때문에 비선형성을 고려한 필터링 알고리즘이 필요하게 된다.
비선형 시스템에 최근 20여년간 가장 널리 사용되어 온 것이 확장 칼만필터(Extended KF-EKF)이다. 그러나, EKF는 비선형 모델을 1차로 선형화 시켜 사용함으로써 오차가 매우 클 경우에는 추정 성능이 저하되는 단점을 가지게 된다.
이러한 문제를 해결하기 위하여 1995년 Julier와 Uhlmann에 의하여 UKF(Unscented Kalman Filter)가 연구되어 그 성능이 다양한 비선형 시스템에서 우수한 성능을 가지는 것으로 알려졌다.
UKF는 시그마 점(Sigma Point-SP)
UKF는 시그마 점(Sigma Point-SP)이라 부르는 확정적인 선택 점(deterministically chosen points)의 집합을 비선형 모델을 사용하여 변환하는 Unscented 변환(Unscented Transform-UT)에 기초를 두고 있다.
시그마 점은 비선형 모델의 랜덤 상태변수를 통계적으로 가장 잘 나타낼 수 있도록 선택 된다.
지금까지 연구된 SP의 선택 방법으로는 시스템 차수 N의 2배만큼 SP를 선택하는 기법, 2N개의 SP에 평균값을 추가하여 2N+1개의 SP를 선택하는 기법, SP의 개수를 2N개보다 축소하여 선택하는 기법, SP의 개수를 2N개 보다 늘여서 선택하는 기법 등이 있다.
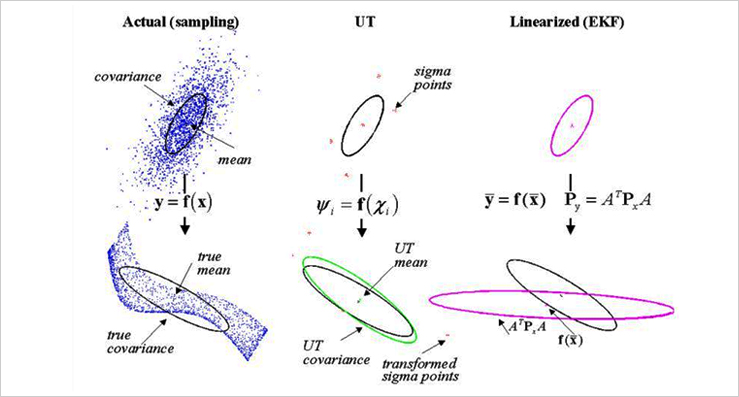
UKF의 기본이 되는 UT에 대해서 간략히 살펴보면 다음과 같다.
UT변환은 비선형 함수로 주어지는 상태 변수의 평균 및 공분산 정보 등의 통계치를 고려한 시그마 점의 결정과 결정된 시그마 점의 비선형 변환 이후의 평균과 공분산 정보를 계산하는 일련의 과정으로 이루어진다.
UT에서 사용되는 기본적인 개념은 EKF와 같이 비선형 함수를 근사화 하는 것보다 확률 분포를 근사화하는 것이 더 용이하다는 것이다.
이러한 UT변환은 입자 필터(particle filter)에서 입자를 결정하는 것과 유사한 개념이나 기본적인 차이점은 입자 필터는 랜덤(random)하게 입자를 선택하지만 UKF에서 사용하는 SP는 결정적인(deterministic) 방법으로 선택한다는 것이다.
이와 함께, UT에서는 가중치를 사용하여 SP의 존재 구간을 변화 시킬 수 있다는 것이 차이점이다. UKF는 앞에서 설명한 UT기법을 적용한 칼만필터이다.
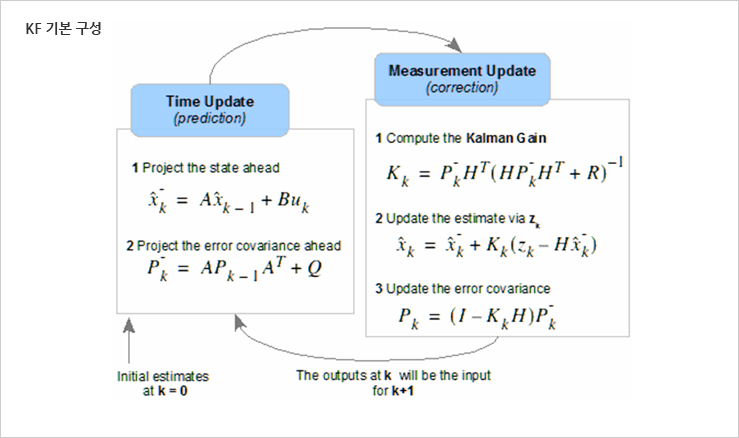
UKF 알고리즘

그림1은 UKF 알고리즘을 간략히 설명하는 그림이다.
UKF는 우선 초기화 과정을 거친 후 시간 업데이트 과정을 거치는데 여기서 SP를 선택하고 변환하여 공분산을 구한 후 측정치 업데이트 과정을 거쳐 우리가 원하는 상태변수를 추정하는 필터이다.
비선형성이 높은 시스템에 대해서 그건 사용되어온 EKF보다 성능이 우수하여 최근 많은 비선형 필터링 분야에서 활용되고 있다.
파티클 필터(particle filter)
파티클 필터(particle filter)는 많은 상태변수 후보(particles)를 시스템의 확률 분포와 연계하여 시스템의 결과를 추정하는 방식이다.
파티클 필터는 많은 계산량(computation load)을 요구하기 때문에 1950년대에 처음으로 소개가 되었지만, 당시의 컴퓨터로는 계산이 어려워 널리 이용되지 않았다. 그러나 컴퓨터의 계산능력 향상과 함께 1987년 Kitagawa가 제시한 베이지안 필터링(Bayesian filtering)과 1988년 Liu&Chen이 제안한 리샘플링(resampling) 방식이 적용된 이후부터는 파티클 필터의 성능이 향상되어 여러 분야에서 사용되고 있다.
일반적인 파티클 필터는 다음과 같은 베이즈 법칙을 기반으로 구성되어 있다.

일반적인 칼만필터와 마찬가지로 이전 스텝의 정보를 시스템 모델의 확률과 결합하여 priori probability density function(pdf)을 구하고 측정치의 likelihood와 결합하여 측정치 업데이트에 의한 posterior pdf를 통해 상태변수의 확률분포를 구할 수 있다.

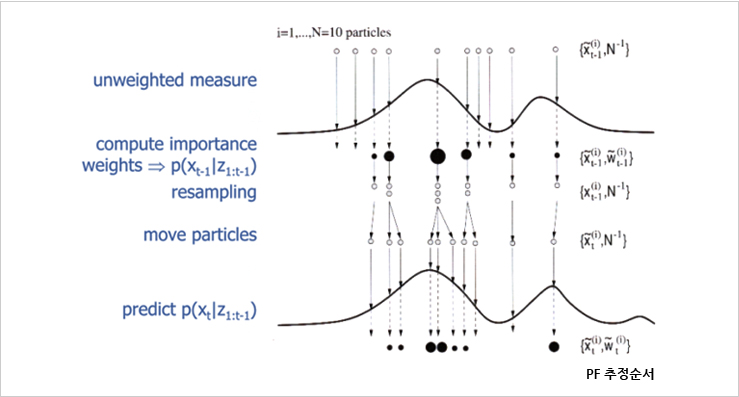
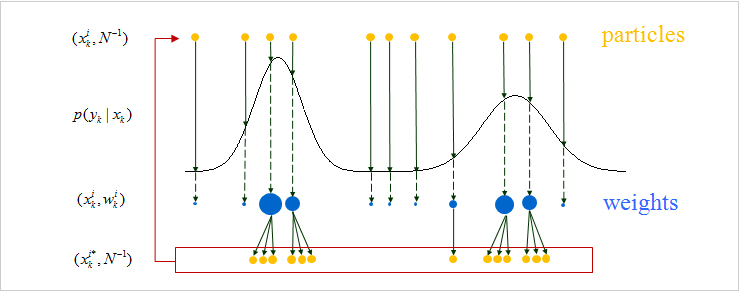
파티클 필터의 기본 개념은 그림과 같다. N개의 입자(state)를 시스템의 확률 분포에 똑같은 가중치로 무작위로 배치한다. 이 때 시스템의 확률 분포가 큰 값에 배치된 입자의 가중치는 커지고, 작은 값에 배치된 입자의 가중치는 작아진다. 그리고 새로 생성된 가중치의 크기를 비교하는데, 작은 값의 가중치를 가지는 입자들은 신뢰하지 않기 때문에 없애고, 큰 값의 가중치를 가지는 입자들만을 선택하고 비교하여 없애버린 입자만큼 자신과 같은 입자들을 생성하여 다시 N개의 입자들을 형성한다.
이렇게 생성된 N개의 입자들을 이용하여 시스템을 추정항고 또한 처음의 과정으로 돌아가 반복함으로써 시스템의 다음 결과를 추정하게 된다.
2000년대에 들어서면서 파티클 필터에 대한 연구가 활발히 이루어져 다양한 방식의 파티클 필터가 개발되었다. Sampling Importance Resampling (SIR) Filter는 기존 파티클 필터의 고질적인 문제인 degeneracy 문제와 계산량을 감소시켰다. 1999년 Pitt와 Shephard는 가중치가 균일하게 형성되지 않았을 경우에 생기는 문제를 해결하기 위해 Auxiliary Sampling Importance Resampling(ASIR) Filter를 제안하였다.
이외에도 Markov Chain Monte Carlo(MCMC) 기법을 사용하여 sample 형성 방식을 개선한 Regularized particle Filter나 SIR 필터에 Kalman Filter를 적용하여 degeneracy 문제를 더욱 감소시킨 Local Linearization Particle Filters(LLPF), 다양한 모델이 존재할 때 적용되는 Multiple Model Particle Filter와 같은 다양한 방식의 파티클 필터가 연구되고 있다.
Introduction
인공위성, 항공기 등 항체에 고장이 발생하면 여러 가지 문제가 발생할 수 있다. 인공위성의 경우, 시스템에 고장이 발생하면 통신, 탐사 등의 임무 수행에 차질을 초래하여 서비스 두절에 의한 경제적 손실과 지구 및 우주탐사를 위한 과학적 연구성과에 치명적인 타격을 준다.
1997년 1월 11일 태양 폭발로 인한 거대한 태양물질방출(CME : Coronal Mass Ejection)로 AT&T사의 Telstar 401 위성의 기능이 정지하는 사건이 일어났는데, 이로 인해 방송통신 서비스 기능이 마비되어 2억 달러 이상의 손실이 발생하였다. 또한, 1997년 7월 2일에 발생한 일본의 ADEOS(Advanced Earth Observing Satellite) 위성의 고장은 해수면의 바람에 관한 많은 데이터의 손실을 초래하여, 이를 토대로 하는 기후 관련 연구에 결정적인 문제를 일으키기도 하였다.
이와 같이 인공위성은 고장으로 인한 치명적인 손실 위험에도 불구하고 우주공간에서 장시간 자율적으로 임무를 수행해야 하기 때문에 시스템의 신뢰도가 매우 높아야 한다.
신뢰도를 높이기 위한 기법으로써 위성을 구성하는 여러 하위 시스템에서 고장이나 오작동 등의 돌발상황이 발생하더라도 임무수행을 지속적으로 할 수 있도록 고장검출, 분리 및 복구(FDIR : Fault Detection, Isolation and Recovery)가 가능한 시스템의 개발이 요구되고 있다. 기후관측위성과 같이 지구궤도에서 운용되는 인공위성의 경우, 시스템이 정상적인 상태일 때는 임무수행 모드로 동작하다가 고장이나 오작동이 발생하면 자동적으로 안전모드로 전환되며, 지상 기지국에서 모드변화를 수신하여 시스템의 고장진단 절차를 수행할 수 있다. 그러나 심우주(deep space)를 운항하는 인공위성의 경우 지상 기지국에서 고장검출 및 진단 과정을 수행하기 매우 어려우므로, 위성이 스스로 FDIR을 수행할 수 있도록 하는 기술이 반드시 확보되어야 한다.
FDI 알고리즘의 예로 그림 1은 인공위성 자세제어시스템(AOCS : Attitude and Orbit Control System)의 알고리즘 구성도를 나타내고 있다.

고장에 대처할 수 있는 시스템을 설계하는 방식에는 크게 하드웨어 여분(hardware redundancy) 기법과 해석적 여분(analytic redundancy) 기법으로 분류된다. 기존의 항공기 연구분야에서는 다중의 하드웨어를 장착하여 고장에 대처하는 하드웨어 여분 기법을 주로 적용하였으나, 비용이 많이 든다는 단점 외에도 물리적인 공간을 크게 차지한다는 이유 때문에 위성에 적용하는 제한이 따른다. 그러므로 최근 우주과학기술 선진국에서는 해석적 여분 기법을 이용한 FDIR에 대한 연구가 활발히 진행되고 있다. 세계 10위권의 우주개발 선진국에 진입하고 있는 대한민국도 지속적으로 인공위성을 개발하게 되는 만큼 향후 이러한 고장에 대응하여 인공위성 시스템의 신뢰도를 높일 수 있는 기술에 대한 확보가 절실히 필요할 것으로 판단된다. 그림 2는 시스템에 고장이 발생한 경우 이를 검출, 진단하는 과정을 나타내고 있다.

Hardware redundant algorithm
일반적으로 시스템에 발생한 고장은 내, 외적인 요인에 의한 비정상적인 반응으로 정의할 수 있으며, 대처 불가능한 상태를 지칭하는 파손과는 다른 의미를 가지고 있다. 고장 및 지능형 복구시스템의 경우 고장이 발생하였다는 것을 감지하고, 이 고장을 종류, 크기, 발생위치, 발생시간 등으로 진단하여 진단된 고장을 분리하거나 다른 장치로 대체하여 시스템을 복구한다. 고장 복구 기법은 고전적으로 하드웨어 여분을 이용한 고장복구 기법과 현대의 해석적인 여분을 이용한 고장복구 기법으로 크게 분류할 수 있다. 하드웨어적 여분 기법은 정상작동을 위해 중요한 센서들을 주로 삼중(triplex) 또는 사중(quadruplex)으로 중복 배치하여 센서의 고장을 검출하고 분리하기 위하여 수행한다. 이 기법은 서로 다른 센서로부터 획득한 같은 물리량을 비교하고 투표를 수행함으로써 고장 검출 및 분리를 수행하는 것이다. 추가적으로 하드웨어적 여분 기법은 측정치 값이 미리 정한 상한 값을 초과하면 고장으로 판단하기도 하며, 주파수 스펙트럼을 분석하여 고장을 검출하기도 한다. 주파수 스펙트럼을 분석하는 기법은 측정치 중에서 전형적으로 알려진 주파수 대역을 벗어난 스펙트럼이 발생하면 센서의 고장으로 판단하는 기법이다. 이외에도 시스템에서 고장에 따라 나타나는 특징을 사전(dictionary)처럼 분류하여 비교하는 고장 사전 접근법 등이 있다. 하드웨어적 여분 기법은 구현이 쉽고 간단하지만 전체 시스템의 중량과 복잡성을 증가시키고 소요비용도 증가하는 단점이 존재한다.
IMU(Inertial Measurement Unit)는 자세 측정 장치(AHRS : Attitude Heading Reference System)나 관성항법장치(INS : Inertial Navigation System)의 핵심요소로서 일반적으로 자이로와 가속도계를 각각 3개씩 서로 직각으로 배치시킨다. 그리고 각 센서는 독립적으로 동작하기 때문에 고장의 검출 및 분리가 불가능하며 고장이 발생할 경우 시스템에 치명적인 영향을 미칠 수 있다. 따라서 인공위성, 항공기, 발사체 등과 같이 높은 신뢰도를 요구하는 시스템의 경우 하드웨어 여분 기법이라고 할 수 있는 중첩 IMU(Redundant IMU, 이하 RIMU)를 이용하여 센서 고장에 강인한 AHRS, INS를 개발하고 있다. RIMU는 각각 3개의 자이로 및 가속도계 센서 외에 여분의 자이로, 가속도계 센서를 가지는 IMU로써 센서 배치에 따라 항법 성능과 고장 검출 및 분리 성능에 차이가 발생하기 때문에 중첩 관성 센서 배치에 대한 연구들이 활발하게 진행되었다. 그림 1은 원추모양으로 배치된 RIMU 구성을 나타내고 있으며, 그림 2는 본 연구실에서 제작한 RIMU를 나타내고 있다.

Analytic redundant algorithm
해석적 여분 기법은 하드웨어적 여분 기법이 아닌 FDI 기법을 포괄하는 개념으로 다양한 해석적 여분 기법을 분류하고 그 특징을 비교하기 위하여 측정치를 다른 관점에서 바라볼 필요가 있다. 즉, 고장 검출을 수행하기 위해 프로세스의 측정치들을 이용하여 최종적으로 고장을 진단하기 전까지 측정치를 다양하게 변환하게 되는데, 이 변환 방법을 분류하여 정의할 수 있다.
변환방법들을 분류하는데 있어서 대표적인 요소는 프로세스에 관한 사전 지식(priori process knowledge)의 유무와 탐색 기법의 두 가지 요소가 있으며, 때로는 지식 기반 시스템, 패턴 인식, 해석적 모델 기반 방법 등으로 분류하기도 한다.
하지만, 이들을 사실상 명확하게 분류하는 것은 어렵기 때문에 어느 정도 겹치는 것은 불가피하다. 보통 FDI 수행 과정을 프로세스 측정치의 변환 또는 맵핑의 연속이라고 말할 수 있으며, 이를 도식적으로 나타내면 그림 1과 같다. 여기서 측정치들은 사전의 정보를 바탕으로 고장을 진단하기 위한 시스템 거동의 유용한 특징을 추출하기 위해 해석되고 통합된다. 즉, 센서의 출력을 가공하여 고장의 영향에 가장 민감한 변수를 얻을 수 있고, 이 변수들로 이루어진 특징공간을 구성하는 것이 가능하다. 한편 특징공간에서 결정공간으로의 맵핑은 오경보 등을 최소화 하기 위한 기능을 수행하며 보통 판별식이나 간단한 문턱함수(threshold function)을 이용하여 수행한다. 또한 결정공간에서 분류공간으로의 변환은 사례별로 문턱함수, 템플릿매칭(template matching), 또는 상징추리(symbolic reasoning) 등을 이용하여 수행한다.

이와 같이 해석적 여분기법의 고장진단 알고리즘은 지식의 종류와 탐색 전략에 따라 구분할 수 있는데, 사전의 지식이 시스템의 물리적 모델기반인지 시스템의 과거 경험이 바탕인지에 따라 모델기반 또는 이력(history) 기반으로 나눌 수 있다. 또한 모델기반 방식은 구체적으로 시스템의 입력과 출력 사이의 관계를 수학적 함수로 표현하여 이해할 수 있는 경우 정량적(quantitative) 모델 기반으로 분류할 수 있고 반면에 정성적(qualitative) 함수로 나타내어지는 경우 정성적 모델기반으로 분류할 수 있다. 해석적 여분 기법은 하드웨어적 여분 기법에 비해 시스템 중량과 소요비용 등을 줄일 수 있으며, 수치적 계산을 통해 고장진단을 수행하기 때문에 마이크로프로세서의 발달과 함께 실제 시스템에 많이 적용되고 있다.
